Ages 10+ • Beginner
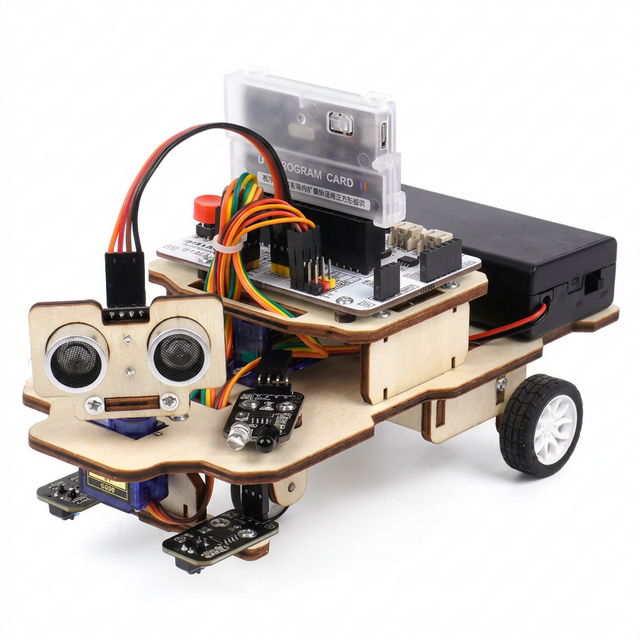
Robot Car V4
$159.99
star
star
star
star
star_half
(42 reviews)
Neural-linked 4WD obstacle navigation system. Build a fully autonomous robot car that can detect and avoid obstacles using ultrasonic sensors, follow preset paths, and be programmed via C++ or Python.
// TECH_SPECS
straightenDimensions: 22×18×12cm
scaleWeight: 480g
battery_fullBattery: 3.7V Li-Ion
sensorsUltrasonic + IR Sensors
memoryArduino Compatible
codeC++ & Python